|
傢傟傢傟偼偙傟傑偱偺嫟憂僔僗僥儉偺尋媶惉壥傪摜傑偊偰丆2003擭搙偐傜僂僅乕僋儊僀僩丒僾儘僕僃僋僩傪僗僞乕僩偝偣傑偟偨丏偦偙偱偼挿栰導偺恴朘抧堟偺奆偝傫偲嫤椡偟偰曕峴夘彆儘儃僢僩Walk-Mate偺奐敪偲惗嶻傪峴偄傑偡丏摿偵丆崅楊幰偑惗妶偺拞偱棙梡偱偒傞傛偆偵Walk-Mate偺僂僃傾儔僽儖壔傪恑傔丆幚梡揑側惢昳偲偟偰峔惉偡傞梊掕偱偡
|
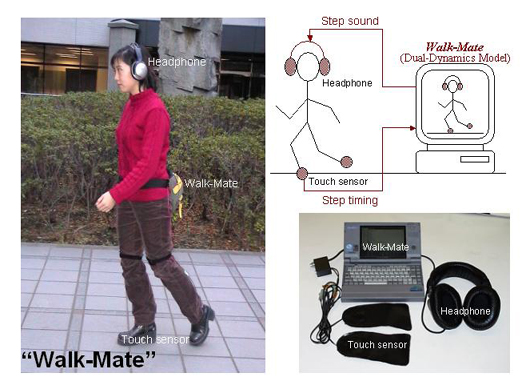
幨恀乮壓嵍乯偼懌庱偺偲偙傠偵憰拝偡傞僞僀僾偺Walk-Mate偱偡丏
偝傜偵丆條乆側堛椕婡娭偺偛嫤椡偵傛傝丆懡條側崅楊忈奞幰偵偍偗傞桳岠惈偺専徹傕恑傔偰偄傑偡丏乮壓塃乯
傑偨丆偙傟傜偺妶摦偼俤倀偵偍偗傞俧俼俹僾儘僕僃僋僩偲傕楢実偟偮偮丆儈儏儞僿儞抧堟偺崅楊幰偺曽乆偵傛傞桳岠惈昡壙傕恑傔傑偡
偦偟偰丆偙傟傜堦楢偺妶摦傪捠偟偰嫟憂揑僐儈儏僯僥傿偯偔傝傪悇恑偟丆嶻嬈偲惗妶偑堦懱壔偟偨抧堟偺妶惈壔偵偮側偑傟偽偲婅偭偰偄傑偡丏 |
 |
 |
| 儉乕價乕偱偦偺條巕傪帵偟傑偡丏妛惗偝傫偺媟偺堦曽傪屌掕偟偰媅帡揑偵曕峴忈奞傪峔惉偟偨応崌偵偍偗傞Walk-Mate偲偺嫤挷曕峴偺岠壥傪偛棗壓偝偄丏 |
扨撈曕峴帪
|
Walk亅Mate憰拝帪
|
| 忋婰偺丆曕峴忈奞傪柾媅偟偨扨撈曕峴偱偼丆嵍旼娭愡傪屌掕偟偰偄傑偡偑丆曕偒偵偔偔側偭偰偄傞條巕偑傢偐傞偲巚偄傑偡丏偙傟偵懳偟偰Walk-Mate偲偺嫤挷曕峴偱偼丆僺僢億偲偄偆壒傪夘偟偰憡屳偺曕峴儕僘儉偺娫偑懙偭偰偄傑偡丏偙傟偵傛偭偰曕峴塣摦偺埨掕惈偑夵慞偝傟丆偟偐傕嵍塃媟偱偺旕懳徧惈傕夵慞偝傟偰偄傑偡丏傑偨丆偙傟偲椶帡偺岠壥偑幚嵺偺姵幰偝傫偱傕婛偵妋擣偝傟偰偄傑偡丏 |
 |
 |