ロボットとのリズム同調による「間(ま)」の合う歩行アシスト
2人並んで歩いていると自然に歩調が揃うことがありますが、このような「間(ま)」を合わせる
リズム同調現象(Entrainment)を人間とロボット間に再現した歩行アシストロボットです。
歩行のリズムの安定化を通して歩行パフォーマンスの改善を目指しています。
既に、パーキンソン病や脳卒中患者の歩行トレーニングに使用されています。
(東工大特許:日本、米国及びEUで特許取得済み)

ロボットによる期待される効果
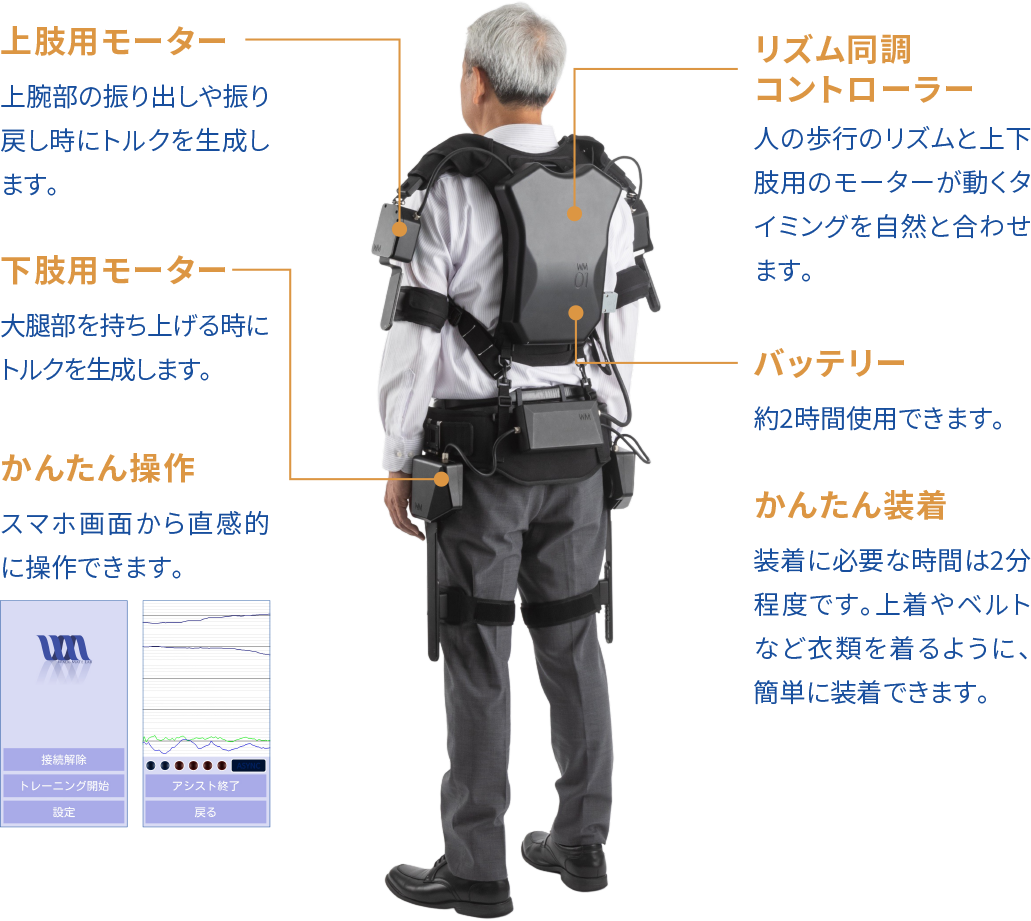
装着者が腕を振り、足踏みを始めてしばらくすると、その動きをロボットが検知し、腕と足のモーターが動き出します。検知した歩行リズムとモーターの動きを同調させ、一定のリズムで歩くことが出来るよう、腕や足の動きをアシストします。
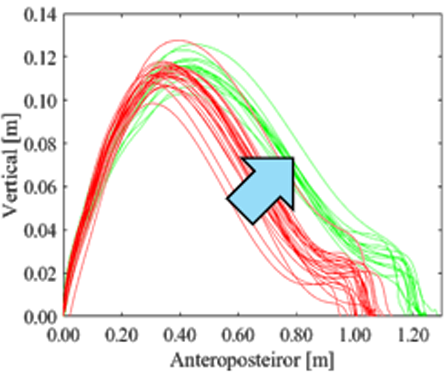
パーキンソン病患者の方にWM ROBOTを使った腕振りリズムトレーニングを行いました。その結果を示します。この図は、歩行の軌道を横から見たもので、一本の線が歩行の一歩を表しています。横軸はストライド長を表し、縦軸は足上げの高さを表しています。
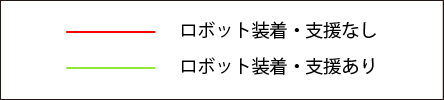
左図の赤色の線は、ロボットは装着しているが、ロボットの支援が無い時の歩行軌道を表し、緑色はロボットが支援した時の歩行軌道を表しています。ロボットの支援によりストライド長と足上げの高さが増加しました。右図の青線は、ロボットの支援が無い時の歩行軌道を表し、茶色はロボットで支援した後に、ロボットを脱着して歩行した時の歩行軌道を表しています。ロボット脱着後も歩行軌道の改善効果は残存しました。
ストライド長、足上げの高さの増大
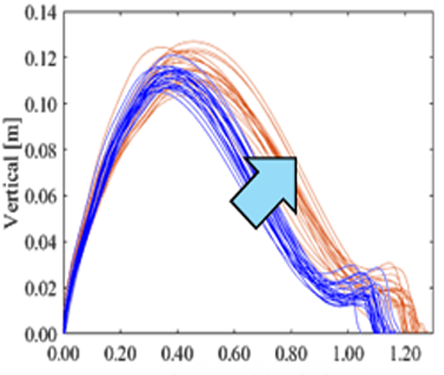
残存効果あり
一歩一歩の歩行軌道を横から見た図